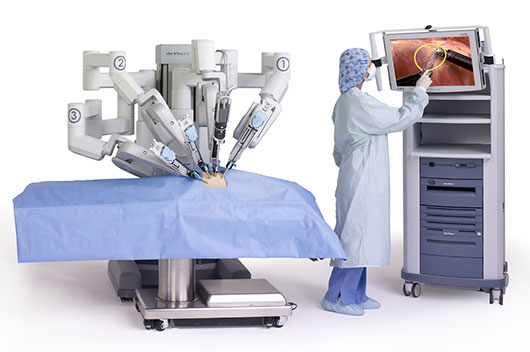
جــراحــی لاپــاروسـكــوپــی يكـی از مصـاديـق جـراحی بـا حـداقـل آسـيـب اسـت كـه در حفره شـكـمــی انـجــام مـیشـود. وظـيـفـه ايـن روبـات نگهداشتن دوربين لاپاراسكوپ و قرار دادن آن در موقعيتهای مناسب است تا ديد خوبی برای جراح فراهم كند. اين روبات سرعت جراحی را افزايش و زمان آن را به ميزان قابل توجهی كاهش میدهد.
كار كردن با روبات كمک جراح لاپاراسكوپی بـسـيــار راحـت اسـت ؛ در حـدی كـه كسـانـی كـه دورههـــای فـــوق تـخـصـصــی لاپــاراسـكــوپــی را میگذرانند ، میتوانند خيلی سريع با نحوه كار ايــن روبــات آشـنــا شــونــد و كــار كـردن بـا آن را بيـامـوزنـد ؛ البتـه مـراحـل طـراحـی و سـاخت اين روبات تجربيات جالبی را در بردارد كه در مراكز دانشگاهی فنی مهندسی قابل ارائه است.
در اين روش به منظور دسترسی به ناحيه مورد نظر براي عمل جراحی در داخل شكم ، از دو يا ســه شـكــاف كــوچــک ابـزارهـای جـراحـی و از شكاف ديگر دوربين يا لاپاروسكوپ وارد بدن شده و از طريق تصوير ايجاد شده ، عمل جراحی انجام می شود.

كوچک ترين روبات جراح
دانشمندان روباتی به شكل سوسک اختراع كردهاند كه با ورود به بدن از طريق يک شكـاف ، نيـاز بـه عمـل جراحی را تا حد چشمگيری كاهش میدهد. اين روبات دو سانتیمتر طول و 5 گرم وزن دارد كه با دارا بودن وسايل پزشكی متنوع بسيار كوچک شامل يک دوربين كوچک ، حسگرها و تزريقگر دارو میتواند از يک شكاف ايجاد شده توسط جراحان در پوست، وارد بدن شده و اقدامات پزشكي را در داخل بدن به انجام برساند.
زمان زيادی از توليد روباتهايی كه برای عكسبرداری داخل بدن انسان ها ساخته شده است نمیگذرد و اكنون محققان توانستهاند اين روبات را كه مزيتهای بسيار بيشتری دارد ، اختراع كنند.
چندی پيش ، گروه تحقيقاتی ديگری در راستای گسترش هرچه بيشتر از روباتها برای كمک به انسانها در زمينههای پزشكی ، در نمايشگاه روباتيک ژاپن روباتی را در معرض نمايش قرار دادند كه به عنوان يک جراح واقعی عمل میكرد.
اين روبات وارد رگهای خونی میشد و با هدايت اين روبات ، دانشجويان رشته پـزشكـی و سـايـر پـزشكـان مـیتـوانستند طريقه ورود به رگهای خونی بدن بيمار و مراقبتهای قلبی عروقی را به صورت عملی آموزش ببينند. البته اين روبات ، فقط جنبه آموزشی ندارد و با آن میتوان بدون انجام جراحیهای باز بيمار را درمان كرد.
در تحقيقات گذشته برای انتقال سيگنالهای مغز به روبات معمولا از عمل جراحی برای قراردادن سيمهای رابط الكترونيكی درون بدن انسان استفاده میشد و در برخی ديگر نيز افراد استفادهكننده بايد در زمينه ارسال سيگنالهای خود به روبات آموزش میديدند كه نتايج كار نيز معمولا در زمينه خواندن سيگنالهای مغزی چندان دقيق نبود.
پژوهشگران هم در راستای گسترش استفاده از روباتهای پزشک ، اعلام كردهاند كه در حال كار روی روبات كوچكی هستند كه از طريق يک شكاف وارد بدن شده و مشكـلات قلبـی را درمـان مـی كنـد و همـاننـد ديگر روباتها به افزايش مهارتهای پزشكان در اتاق عمل كمک میكند.
روبات ديگری نيز مدتی قبل با مهارت فيلمبرداری كه يک گروه از محققان در مركز تحقيقات پزشكی آن را ساختهاند ، معرفی شد كه میتواند در درون معده يا شكم بيمار حركت كند و زوايای مختلف قسمتهايی را كه بايد معالجه شوند ، به جراح نشان دهد. اين روبات كه ماهها از معرفی آن میگذرد ، همچنين مجهز به يک سوزن قابل جمع شدن است كه به آن امكان میدهد از درون بدن بيمار نمونهبرداری كند.
يكـی از ايـن دستـاوردهـا مـربـوط به روبات پرآوازه داوينچی می شود. اين روبات میتواند با ايجاد يک شكاف كوچک در گردن ، عمل جراحی تيروئيد را با موفقيت كامل انجام دهد. طی سالهای اخير روباتها در اعمال جراحی اورولوژی و بيماریهای زنانه حضور يافتهاند ، اما اين نخستين باری است كه از آن ها در عمل جراحی تيروئيد استفاده میشود.
بيماری تيروئيد در پی نوعی اختلال صورت میگيرد كه به موجب آن در گردن فرد برجستگی به اندازه ميوه كيوی ايجاد میشود. اين بيماری تاكنون از طريق يک شكاف بزرگ در قسمت تحتانی گردن جراحی می شد اما جای بخيهها روی گردن فرد بيمار باقی میماند. روبات جديد قادر است جراحی مورد نياز برای درمان اين بيماری را از طريق ايجاد يک شكاف كوچک در گردن به وجود آورد تا در نهايت اثری از بخيههای جراحی باقی نماند.
غده تيروئيد ميزان سوختوساز بدن را كنترل میكند و بيماری مربوطه به 2 حالت خوش خيم و بدخيم رخ ميدهد.
استفـاده از روبـاتهـای جـراح در امـور پـزشكـی نظـامـی نيز در سال های اخير با سـرمـايـهگـذاریهـای كـلانـی همراه بوده است. روباتها در آيندهای نه چندان دور جايگزين پزشكان نظامی خواهند شد. در همين راستا گروهی از دانشمندان سيستم جــراح روبــاتــی را ابــداع كــرده اســت كــه مــی تــوانــد در آيـنـدهای نـزديـک جـايگـزيـن بيمارستانهای متحرک و پزشكان نظامی در ميادين جنگ شود.
از اين رو میتوان پيشبينی كرد بهزودی بيمارستانهای متحرک نظامی توسط ترونا پاد يا همان جراح و پرستار روباتيک اداره شوند. اين ابزار كه در حال حاضر تحت آزمايشهای اوليه قرار دارد ، به جراح كنترل از راه دور با 3 بازوی روباتيک مجهز است.
روبات جراح به 12 سيستم ديگر از جمله سيستم فعالسازی صوتی تجهيز شده است. همچنين يک تکبازو وظيفه حمل ابزار جراحی مورد نياز را به جراح روباتيک داشته و در عين حال ابزاری را كه نيازی به آن ها نيست جا به جا میكند.
روبات پرستار سياری نيز وظيفه توزيع ابزار مناسب را در حين كنترل علائم حياتی به عهده خواهد داشت. در حقيقت می توان ديد كه همه اعمالی كه در يک بيمارستان صحرايی يا نظامی صورت خواهد گرفت ، تحت كنترل سيستمهای روباتيكی خواهد بود.
محققان هدف اصلی از توليد اين سازه يكپارچه روباتيک جراح را ارائه خدمات درمانی سريع و مطمئن به سربازان مجروح قبل از انتقال آن ها به بيمارستانها عنوان میكنند. در نتيجه اين روبات بايد توانايی انجام فرايندهای احيای افراد را نيز داشته باشد.
اين سيستم روی حداقل فرايندهايی كه علائم حياتی مجروحان را به حالت پايدار خواهد رساند ، تمركز دارد. از جمله اين فرايندها ، فراهم كردن مسير جريان هوا و ارائه درمانهای سريع برای جراحتها مانند كنترل خونريزی در افراد است. روبات جراح توسط پزشكی از راه دور كنترل شده و میتواند با ديگر روباتها ارتباط برقرار كرده و آن ها را هدايت كند.
يكی از 3 بازوی روبات ، آندوسكوپی را نگه مـیدارد تـا كنتـرلكننـده قـادر بـه مشاهده بيمار بـاشـد و ايـن در حـالـی اسـت كه 2 بازوی ديگر عمليات درمانی را بر روی فرد انجام میدهند.
هـمـچـنـيــن ايــن روبـات اجـازه انجـام بـرخـی عمليات ساده از قبيل بخيهزدن را بدون نياز به هدايت انسانها دارد.
هـمـان طـور كـه كـاملا مشخص است هزينه طراحی و ساخت اين دسته از روباتها بسيار قابل توجه است و معمولا شركتهای كوچک تحقيقاتی توان تأمين آن ها را ندارند.
در ميان تمامی روباتهای جراحی كه با تكيه بر فناوریهای نوين طراحی و ساخته میشوند ، آن دســتـــه از اهــمــيـــت و جـــذابــيـــت بــيــشـتــری بــرخــوردارنــد كــه كـمـتـريـن نـيـاز را بـه حـضـور نيـروهـای متخصـص انسـانـی داشته باشند. اين روبات جراح بدون كمک گرفتن از انسان موفق بـه انجام جراحی ظريف و يافتن تركش فلزی شده است. اين فناوری میتواند هزينه و زمان مــورد نـيــاز بــرای نـمـونـهبـرداری و ديگـر انـواع جراحی را كاهش دهد. يافتن تراشههای فلزی آخـريـن دسـتـاورد روبـاتهـای جراح به شمار نمیرود.
مـحققان معتقـدنـد سوزن موجود در روبات جراح جديد را میتوان به وسيله ابزاری متعدد جايگزين كرد تا روبات بتواند در انجام عملياتی ديگر از قبيل بيهوشی بيمار شركت داشتـه بـاشد. دانشمندان بر اين باورند گسترش كامل استفاده از روباتها به عنوان جراحی قابل اطمينان تا 10 سال آينده امكانپذير خواهد بود كه با وجود هزينه بالا ، دقت بالای انجام جراحی و ايمنی آن میتواند استقبال از اين فناوری جديد را با گسترش مواجه سازد.

ساخت دو بازوی روباتيک جراح 5 درجه آزادی
محققـان مـوفـق بـه سـاخـت دو بـازوی روباتيک جراح 5 درجه آزادی برای انجام جراحیهای از راه دور شدند.
قابليت كنترل به صورت پايه و پيرو كه امكان سازی يک سيستم جراحی از راه دور را فراهم میكند ، از ويژگیهای اين بازوها است كه با گرفتن فرامين از سيستم پايه و انتقال آن توسط پروتكل های اينترنتی به سيستم پيرو ، قابليت عملكرد در فواصل چندين هزار كيلومتری را فراهم میكند. اين بازوهای روباتيک هم میتوانند به صورت جراح اصلی برای انجام عمل جراحی و هم به صورت كمک جراح برای نگهداری دوربين های آندوسكوپ مورد استفاده قرار گيرد. اين بازوهای روباتيكی با بهره گيری از يک سيستم مختصات كروی قابليت پوشش فضای كاری مورد نظر جراحان در جراحی از راه دور را كه بر پايه جراحی لاپاراسكوپی انجام می پذيرد ، دارد. عملگر نهايی اين روبات به راحتی در همه نقاط مورد نياز در اختيار جراحان قرار میگيرد. اين سيستم دارای 5 درجه آزادی بـوده كـه 3 درجـه آن متشكـل از دو چـرخش و يک حركت انتقالی مربوط به قرارگيری عملگر نهايی در موقعيت مورد نظر جراح بوده ، يک درجه آزادی مربوط به چرخش ابزار جراحی و يک درجه آزادی نيز مربوط به گريپر ابزار جراحی است.
استفـاده از اين بازو به يک ابزار جراحی محدود نمی شود و طيف گستردهای از ابزارهای جراحی را پوشش می دهد. اين بازو همچنين امكان استفاده از اكثر ابزارهای جراحی كه دارای قطرهای بين 5 تا 15 ميليمتر هستند را فراهم میكند كه از جمله مزيت های مهم اين بازو به شمار میرود.
نـرم افـزار سيستـم كنتـرلـی روبـات جـراح بـه صورت تطبيقی است ، داده های حركتی روبات پـايـه كـه تـوسـط جـراح داده می شود ، ابتدا وارد كـامـپـيـوتـر مـیشـود و سپس با اعمال الگوريتم كنترلی برای دنبال نمودن مسير دست جراح و حذف لرزش دست به سيستم پيرو وارد می شود كه يكی از اهداف مهم اين پروژه ، بررسی عملی روشهـــای مــخــتــلـــف كــنــتــرلــی در عـمـلـكــرد روباتهای جراح با كنترل از راه دور است.
منبع: ماهنامه مهندسی پزشکی
نظرات شما عزیزان:


